上海理工大学 光电信息与计算机工程学院,上海 200093
为减少待测物体位置变化时光谱系统受到的噪声干扰以及峰值定位误差,基于卡尔曼滤波算法原理,提出一种将Voigt寻峰定位的结果作为观测误差并进行最优估计来提升共焦系统测量精度的方法。先进行标定实验,确定光谱共焦系统的测量范围及精度;再依次对比中值滤波、Savitzky-Golay滤波以及快速傅里叶变换滤波等对光谱信号去噪的处理情况,并选用高斯、洛伦兹以及Voigt拟合等方法寻峰定位。同时,分析了Voigt拟合中的峰值提取、高斯宽度、洛伦兹宽度以及幅值误差对拟合精度的影响。实验结果表明,系统的测量范围可达3 mm,中心光斑半径增大了近1.79倍,采用卡尔曼滤波算法能够降低系统中的噪声引起的定位误差且系统精度能够提升11倍,满足高精度的测量需求。
光谱共聚焦系统 卡尔曼滤波 Voigt拟合 误差函数 spectral confocal system Kalman filtering Voigt fitting error function
1 惠州市华阳多媒体电子有限公司,广东 惠州 516006
2 西安工业大学兵器科学与技术学院,陕西 西安 710021
3 西安工业大学光电工程学院,陕西 西安 710021
为了保证增强现实式平视显示系统(AR-HUD)的虚像像质清晰、虚像距离更远,在视场角更大需求的基础上应尽可能减小AR-HUD的体积。采用自由曲面离轴双反射系统,设计了一款虚像距离为10 m、视场角为10°×5°的虚像显示光路。该光路用孔径光阑偏移范围(Eyebox)模拟驾驶员视野移动范围并分为9个结构,利用多重结构进行优化仿真,每个视场光斑均落于艾里斑之内,图像的调制传递函数均接近衍射极限,畸变、动态像差值均小于行业规定值。满足成像要求后绘制了平视显示系统(HUD)防尘膜并进行光害仿真分析,避免太阳光害进入人眼。最后,绘制AR-HUD外壳,测得其体积为10 L,并通过用户界面(UI)图像对显示效果进行仿真,验证了设计的正确性与可行性。
光学设计 平视显示系统 自由曲面 光学系统 多重结构 激光与光电子学进展
2023, 60(9): 0922001
驻马店职业技术学院信息工程系,河南驻马店 463000
基于无线传感网络的应用依赖于节点对监测区域的可靠覆盖。由于能耗殆尽或故障,节点感测能力可能失效,形成覆盖空洞区域。为此,提出基于模糊推理系统 (FIS)的修复节点选取(FISS)算法。 FISS算法采用自适应感测半径调整策略,利用节点的移动修复覆盖空洞。将节点的剩余能量和覆盖重叠率作为 FIS的输入,并由 FIS估计节点成为修复节点的权值;选择具有权值最高的节点作为修复节点,同时依据修复节点的网络条件,估算修复节点的移动方向和移动距离,最终实现对覆盖空洞区域的修复。仿真结果表明,提出的 FISS算法有效提高了覆盖率,并控制了能耗。
移动无线传感网络 覆盖空洞 空洞修复 感测半径 模糊推理系统 mobile Wireless SensorNetworks coveragehole hole repair sensing radius Fuzzy Inference Systems 太赫兹科学与电子信息学报
2021, 19(1): 145
华南师范大学 物理与电信工程学院, 广州 510006
本文采用自组装纳米球热压印技术, 在旋涂有聚丙烯酸(PAA)薄膜、聚苯乙烯(PS)薄膜的基底上, 旋涂SiO2纳米球溶液, 通过自组装形成纳米球三维密排结构, 接着进行热熔-沉陷处理, 在PS薄膜形成周期性、六角密堆积纳米碗状阵列, 接着利用PAA的水解特性去除PAA薄膜, 将PS薄膜翻转并移至硅片基底上, 通过氧离子刻蚀, 得到纳米孔阵列掩模, 最后结合电子束蒸发镀Al, 制备出大面积、周期性的Al纳米盘阵列。同时也研究了三层膜结构的均匀性对制备大面积、周期性纳米盘阵列的重要性。基于自组装压印技术制备圆盘阵列的研究比传统纳米制作技术操作更简单、效率高、成本低; 同时在新光学元件的基础研究、太阳能光伏设备方面具有潜在应用。
自组装 旋涂 热熔沉陷 孔阵列掩模 盘阵列 Self-assembly Spin coating hot melt-sinking hole array mask disk array
1 中国计量大学生命科学学院, 浙江 杭州 310018
2 浙江省农业科学院食品科学研究所, 农业部果品产后处理重点实验室, 浙江省果蔬保鲜与加工技术研究重点实验室, 浙江 杭州 310021
为了提高对蓝莓果渣的开发利用, 探索了近红外光谱测定三种蓝莓(北陆、 蓝美1号、 灿烂)果渣中花色苷含量的可行性。 通过DA7200采集三种蓝莓果渣的近红外光谱, 利用PCA-MD对北陆、 蓝美1号、 灿烂果渣分别剔除1, 4和8个异常样本。 运用K-S划分样本集得到校正集(686个样本)和验证集(171个样本)。 对样本集分别进行归一化、 变量标准化(SNV)、 多元散射校正(MSC)、 Norris一阶导数(NFD)、 Norris二阶导数(NSD)、 SG卷积一阶导数(SGCFD)、 SG卷积二阶导数(SGCSD)、 Savitzky-Golay(SG)卷积平滑、 正交信号校正预处理, 并建立相应全谱PLS模型。 比较并选择MSC、 SGCSD、 SG卷积平滑、 正交信号校正, 进行预处理方法顺序组合的比较, 结果显示, 全谱PLS模型中最优预处理方法为正交信号校正+SGCSD+SG卷积平滑, 其R2c为0.940 0、 R2p为0.886 7、 RMSEC为0.722 5、 RMSECV为0.246 2、 RMSEP为1.000 5、 RPD为2.970 8。 利用SPA和CARS对预处理过的光谱数据分别进行波长变量的筛选, 依次建立PLS回归模型, 并定量分析其对蓝莓果渣花色苷的预测能力。 在所有预处理方法进行波长变量筛选中, SPA与CARS算法均可以有效地筛选出波长变量, 但SPA筛选出的波长变量, 无法全部建立PLS回归模型, 而CARS算法筛选出的波长变量, 均可建立PLS回归模型。 数据表明, CARS-PLS最佳组合为正交信号校正+MSC+SG卷积平滑+SGCSD, 选择波长数为25个, 相较于原始光谱, 其R2c从0.900 8增长到0.940 3, R2p从0.881 8增长到0.885 7, RMSEC从0.929 1减少到0.720 9, RMSECV从0.317 6减少到0.245 6, RMSEP从1.021 8减少到1.004 9, RPD从2.908 8增长到2.957 5。 近红外光谱的蓝莓果渣花色苷含量测定中, 正交信号校正表现出强大的去噪效果, CARS算法具有简化模型、 适用性较好和预测精度较高等优点。 研究结果表明, 应用近红外光谱技术可以较好地实现三种不同品种蓝莓果渣中花色苷含量的测定, 可为蓝莓果渣品质分级提供一种快速、 支持大样本量的检测方法。
蓝莓果渣 花色苷 近红外光谱 预处理方法 波长变量筛选 Blueberry pomace Anthocyanin Near-infrared spectroscopy Pretreatment method Wavelength variable screening 光谱学与光谱分析
2020, 40(7): 2246
1 大连海事大学航运经济与管理学院, 辽宁 大连 116026
2 辽宁科技大学应用技术学院, 辽宁 鞍山 114051
基于人工神经网络,对激光切割镍基合金样本进行了训练函数拟合,以电流、脉宽、切速及离焦量作为输入向量,以挂渣宽度、切缝宽度及切割完整度的综合评分作为输出向量,找出了最小误差的隐含层节点,以此模型预测激光切割质量,得到最大误差为7.66%,最小误差为-0.32%。以综合评分作为遗传算法的适应度值,在实际应用的工艺参数范围内随机选择了50个种群作为最初寻优群体,对其进行交叉、变异和迭代等操作,寻找最优适应度值及对应的工艺参数。理论预测的最优适应度值为98.41,实际值为89.53,误差为9.03%。该验证样本的质量明显高于25个实验样本的,挂渣平均宽度为81.5 μm,切缝平均宽度为164 μm。
激光技术 激光切割 神经网络 遗传算法 镍基合金 工艺参数 激光与光电子学进展
2018, 55(11): 111404
Author Affiliations
Abstract
1 State Key Laboratory of Information Photonics and Optical Communications (IPOC), Beijing University of Posts and Telecommunications, Beijing 100876, China
2 Beijing University of Technology, Beijing Advanced Innovation Center for Future Internet Technology, Beijing 100124, China
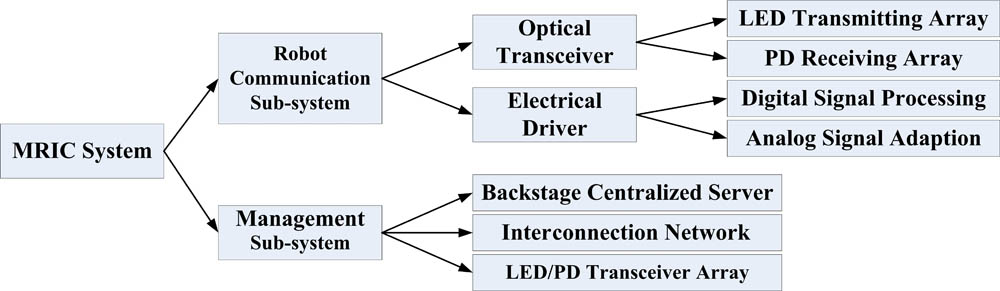
Multi-robot coordination (MRC) is a key challenge for complex artificial intelligence systems, and conventional wireless-communication-based MRC mechanisms that cannot be deployed in radio-frequency-limited environments. In this Letter, we present a promising solution that utilizes indoor omni-directional visible light communication (VLC) technology to realize efficient multi-robot intelligent coordination (MRIC). The specific design is presented along with the implemental details of a practical MRIC experimental platform. The experimental results show that a 50 Mb/s on-off-keying-based omni-directional VLC can be realized with an effective distance of 2.3 m and a bit error rate of <10 6 in the proposed MRIC platform.
230.3670 Light-emitting diodes 060.2605 Free-space optical communication Chinese Optics Letters
2016, 14(10): 102301









